项目背景
多机器人协同 SLAM(如 DCL-SLAM、Swarm-SLAM 等)通过跨机器人相对观测与约束共享,可以扩大覆盖范围并提升建图精度。但很多系统默认一个隐含前提:各机器人局部里程计在大多数时间是可靠的。
在真实部署中,这个前提经常被打破。典型退化环境包括地下矿道、长廊、仓库过道、对称隧道等:点云/特征在某些自由度方向上约束不足,导致局部估计快速发散。此时协同系统若仍按常规方式引入跨机约束,容易出现“坏节点拖垮好节点”的级联失败。
本项目的目标是:让协同系统在存在退化节点时依旧保持健康节点的轨迹稳定,并尽可能挽救退化节点。
问题定义
当 B 车在退化场景里程计发散后,跨机相对位姿约束会把误差反向传播到 A 车: B 车漂移 → 跨机相对观测因子 → A 车被拉偏 → 全局地图/轨迹崩溃
模块设置
- M1:ROI-Tracker
- M2:Scan-to-Model
- M3:B-spline Relative Velocity Estimator
- M4:Factor Builder
S0 实验场景
场景描述
- 水平地面+交叉墙体+立方体障碍物。
- A 机器人静止,B 机器人在一个方向来回摆动。其中,A 的位姿已知(附带一定高斯误差),A 具有激光雷达传感器,B 没有任何传感器。因此可以采用 SO2 流形约束。
误差参数设置:
- 激光雷达:16线,扫描线高斯误差 0.008m
无 NHC 跟踪效果
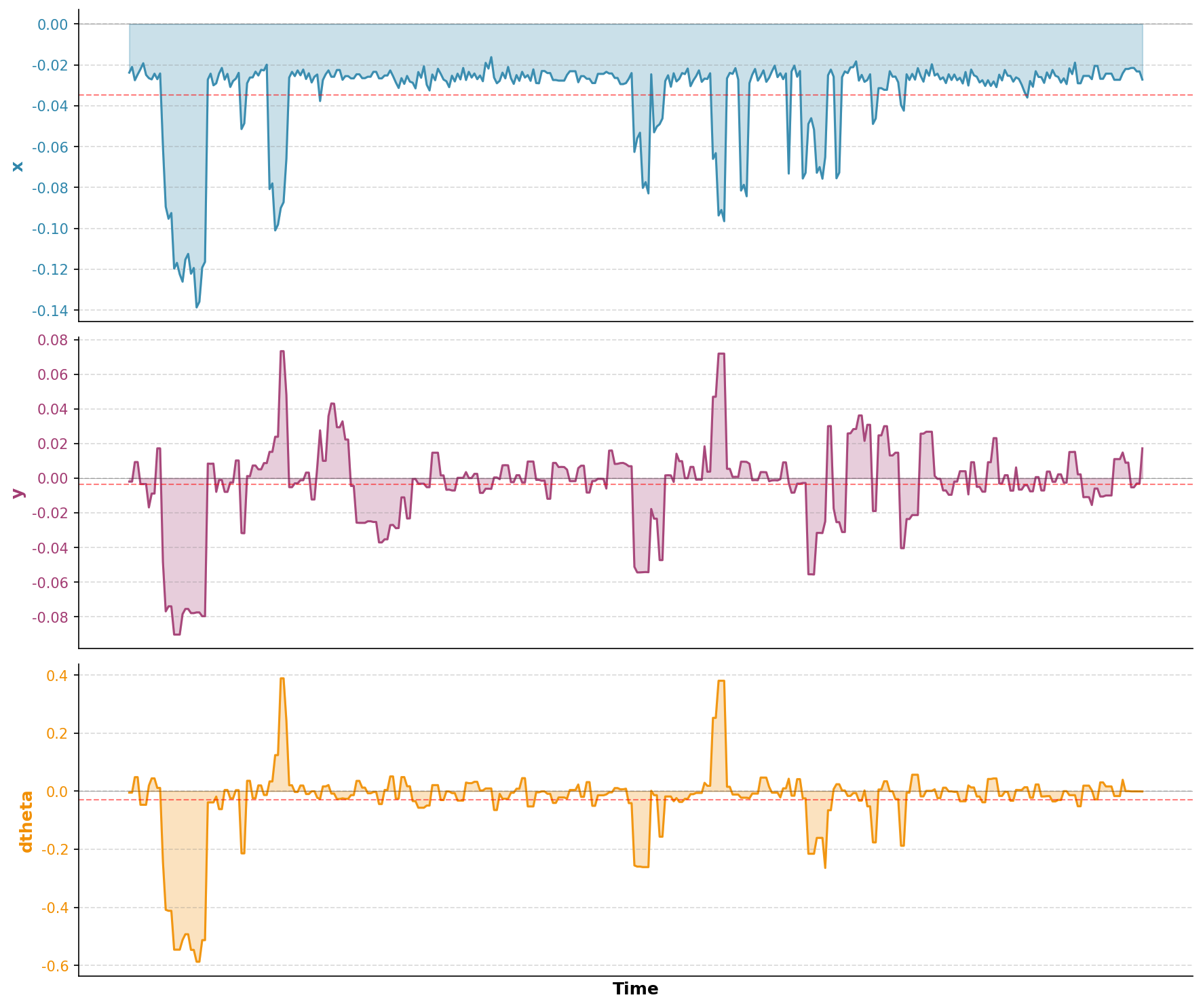
- 利用历史的位姿先验作为输入,X-Y 方向定位结果良好,偏航角在特定情况下会定位失误(MAX_ERROR = 0.6 rad, 约等于34度)。
- 观察数据发现,偏航的大误差集中在特定的时间节点,且此时 B 机器人开始远离 A,扫描有效的匹配点从 40 个降低到 30 个左右。
NHC 跟踪效果
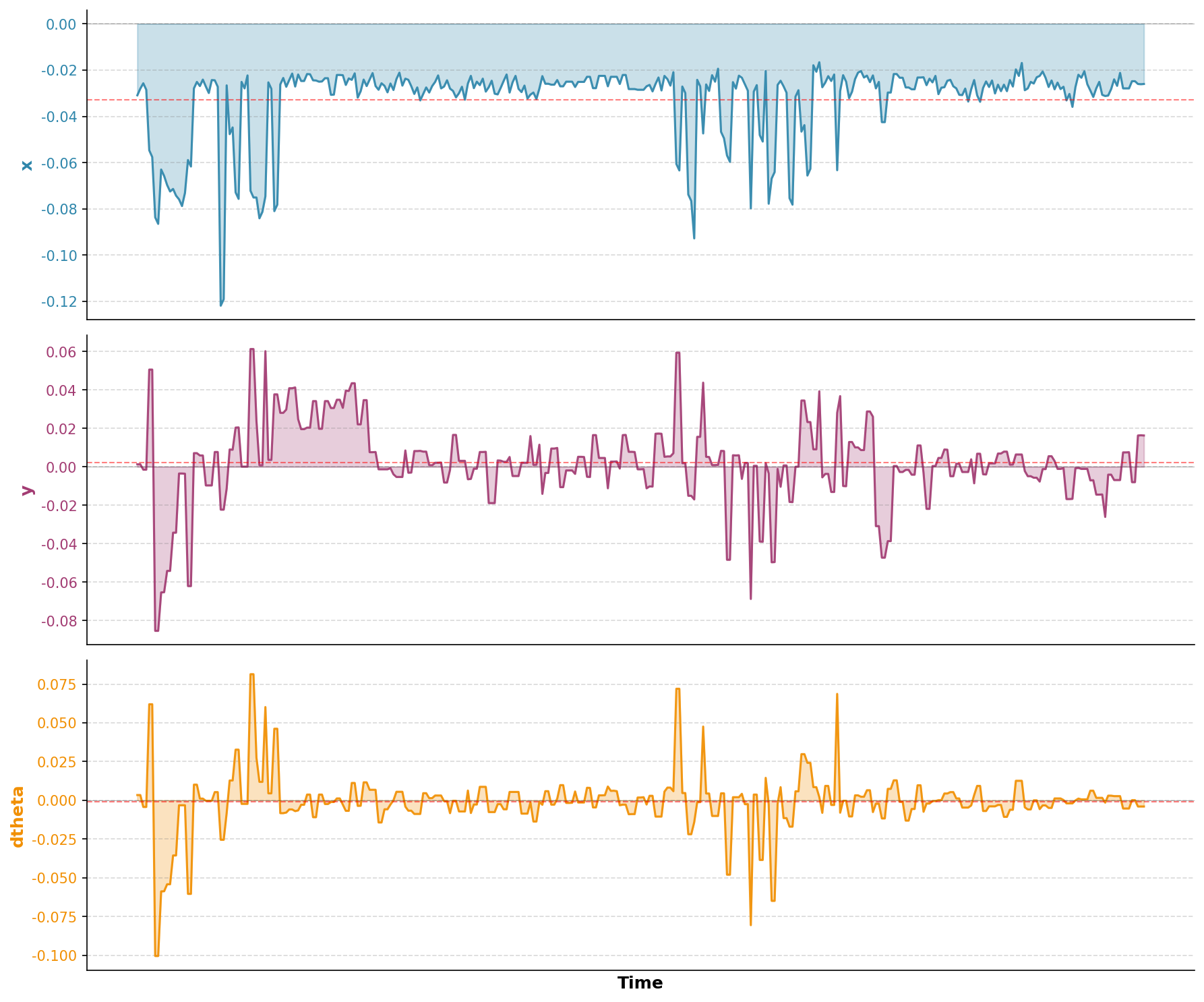
- yaw 维度上的误差被大幅度降低,最大误差为 0.1 rad,约等于 5 度 (可以粗略地认为降低了 80%)
- 当然,这依赖于比较强的先验假设,我们需要没有太多的侧向滑坡