仿真结果
S0 实验场景
场景描述:交叉墙体+立方体障碍物。A 机器人静止,B 来回摆动。
误差参数设置:
激光雷达:
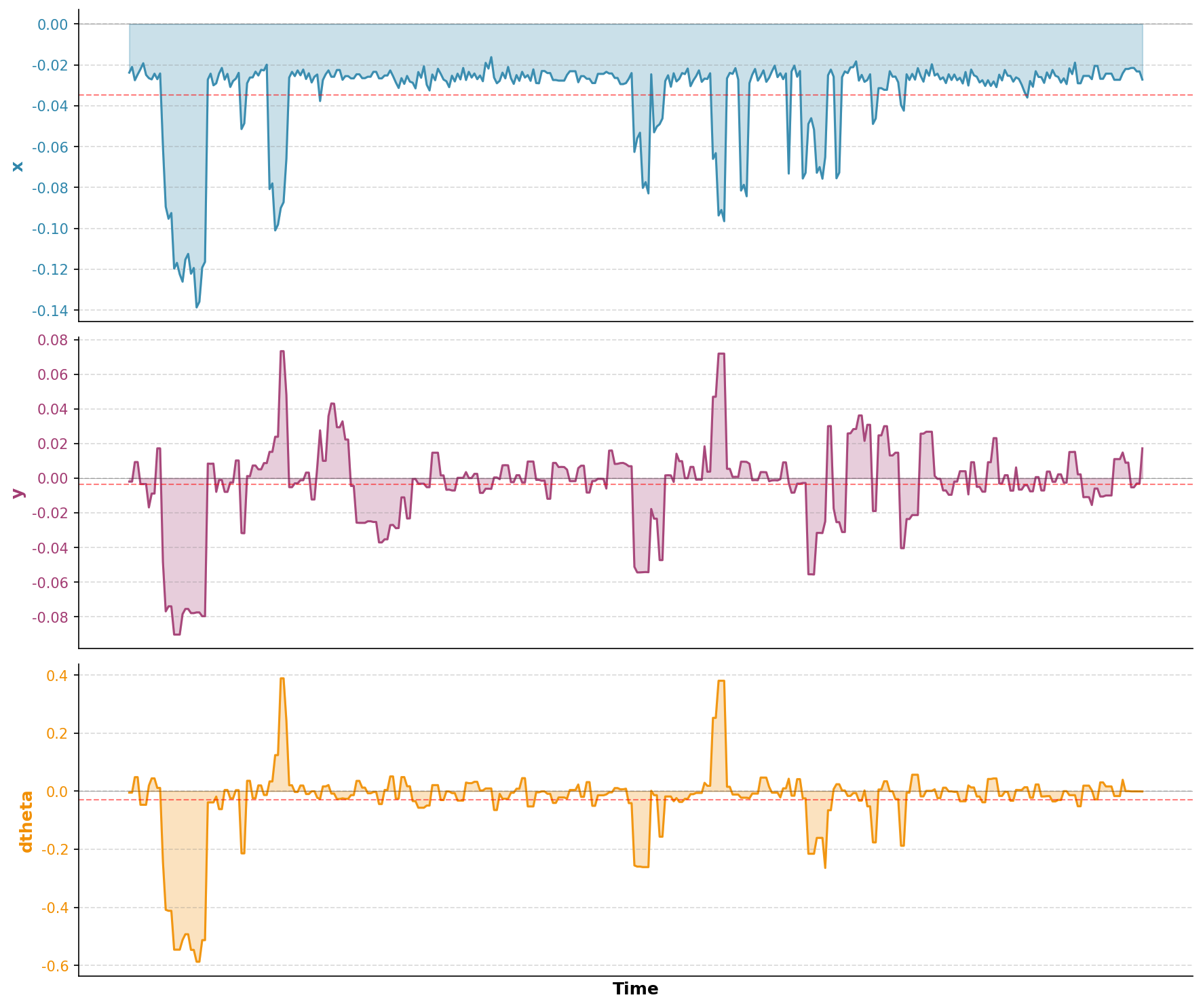
无 NHC 跟踪效果
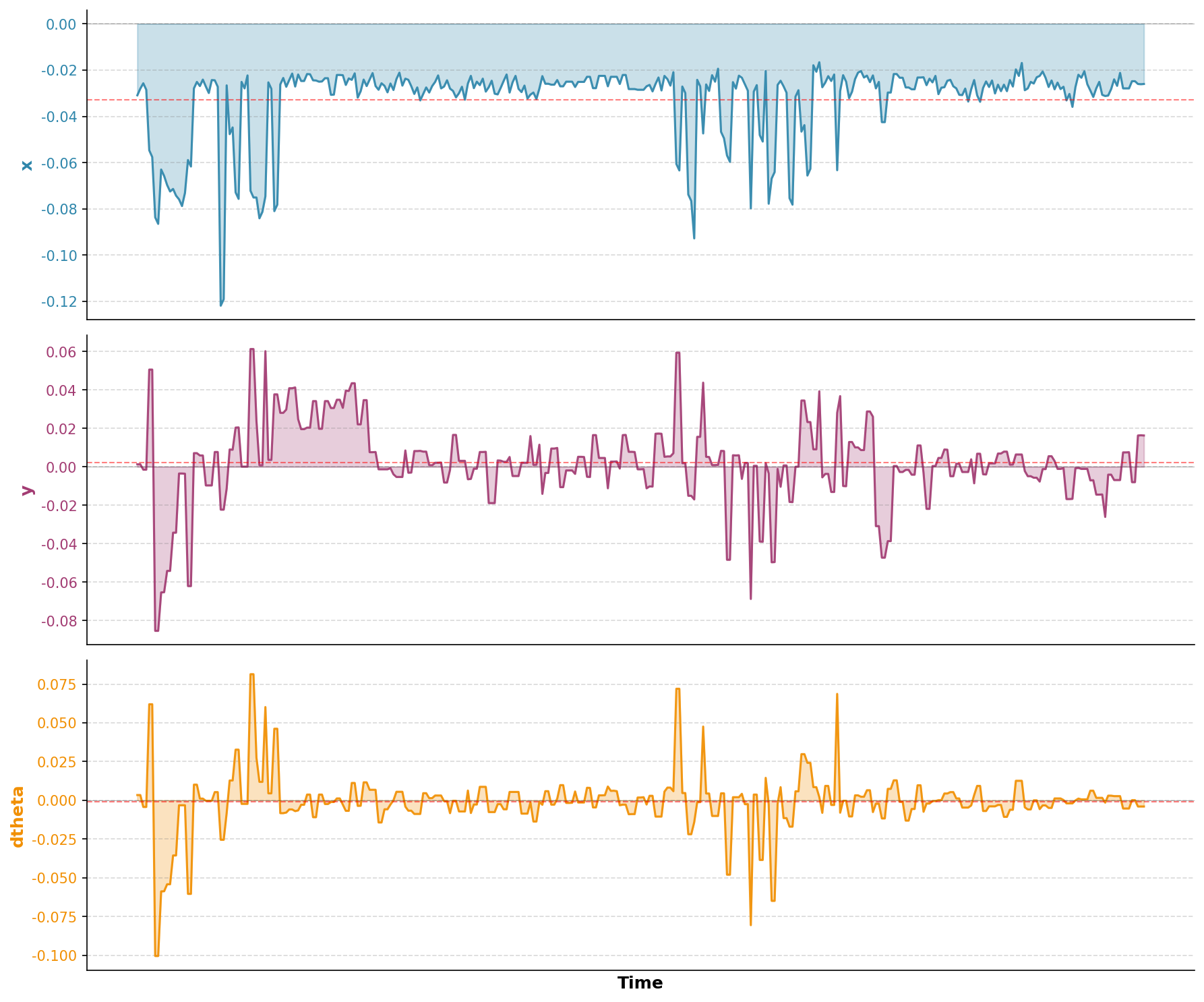
NHC 跟踪效果